Odometry
Track your robot's position on the field with dead reckoning
What is Odometry?
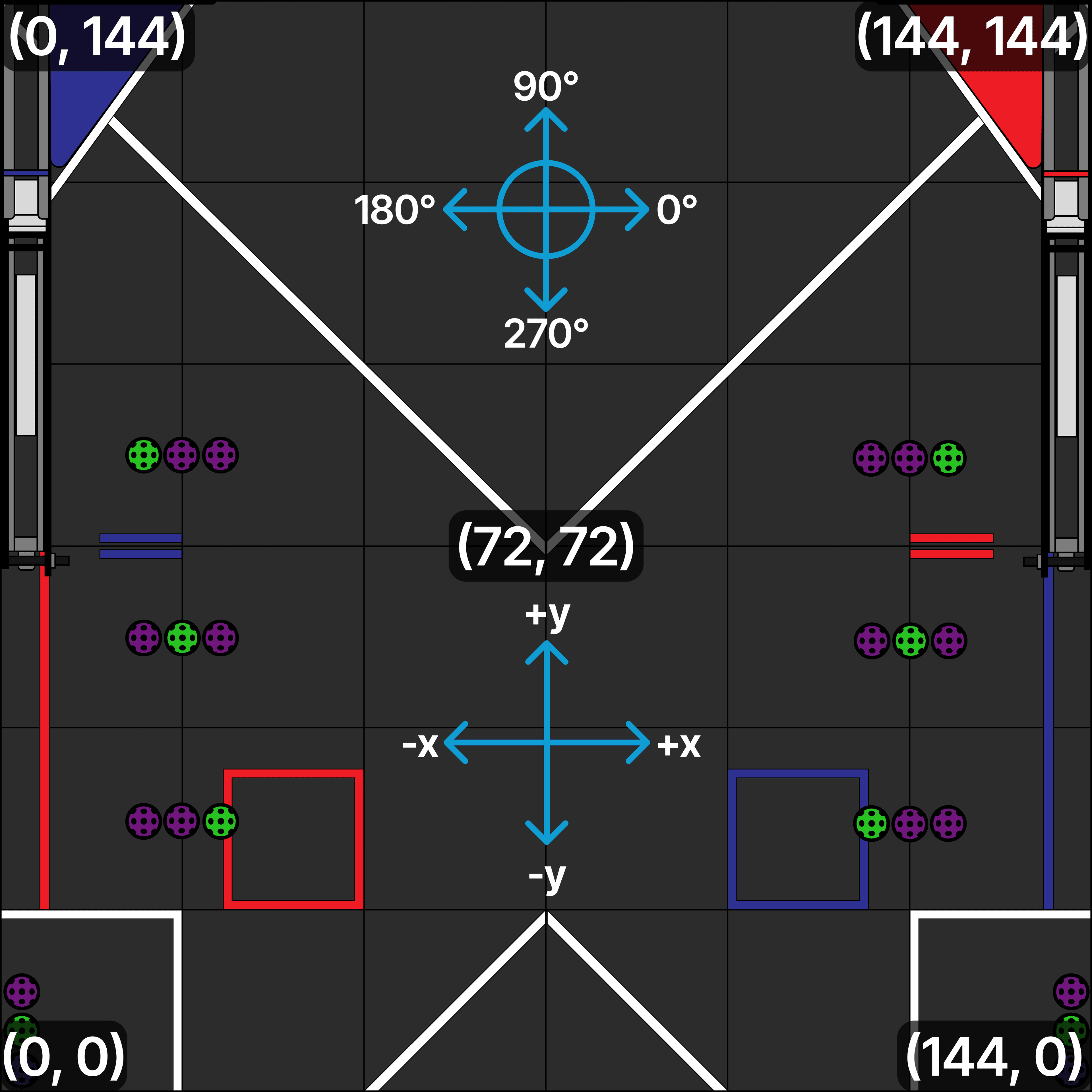
Odometry is the use of sensors to estimate your robot's position (x, y) and heading (angle) on the field. Instead of just knowing "I drove 24 inches forward," odometry lets you say "I'm at position (36, 48) facing 90 degrees."
Think of it like GPS for your robot — except instead of satellites, you're using wheel encoders and sensors to track movement.
Why Odometry Matters
Without odometry:
- Robot doesn't know absolute position
- Can't navigate to specific coordinates
- Errors accumulate with no correction
- Complex paths are nearly impossible
With odometry:
- Robot tracks (x, y, θ) continuously
- Can navigate to any field coordinate
- Errors can be corrected with vision (sensor fusion)
- Enables advanced path following algorithms
How Odometry Works
Odometry continuously calculates position using dead reckoning:
- Measure wheel movement using encoders
- Calculate distance traveled in each direction
- Update robot position based on movement
- Repeat every loop (50-100 times per second)
The math tracks how far the robot moved left/right and forward/backward, then updates the global position estimate.
Types of Odometry
1. Drive Encoder Odometry (2-Wheel)
Uses the drive motor encoders to track movement.
Setup:
- Left drive encoder
- Right drive encoder
- (Optional) IMU for heading
public class TwoWheelOdometry {
private DcMotor leftMotor, rightMotor;
private double x = 0, y = 0, heading = 0;
private int lastLeftPos = 0, lastRightPos = 0;
private static final double COUNTS_PER_INCH = 50.0;
private static final double TRACK_WIDTH = 14.0; // inches between wheels
public void update() {
// Read current encoder positions
int leftPos = leftMotor.getCurrentPosition();
int rightPos = rightMotor.getCurrentPosition();
// Calculate change since last update
double leftDelta = (leftPos - lastLeftPos) / COUNTS_PER_INCH;
double rightDelta = (rightPos - lastRightPos) / COUNTS_PER_INCH;
// Update last positions
lastLeftPos = leftPos;
lastRightPos = rightPos;
// Calculate forward movement and heading change
double centerDelta = (leftDelta + rightDelta) / 2.0;
double headingDelta = (rightDelta - leftDelta) / TRACK_WIDTH;
// Update heading
heading += headingDelta;
// Update position (using average heading)
double avgHeading = heading - (headingDelta / 2.0);
x += centerDelta * Math.cos(avgHeading);
y += centerDelta * Math.sin(avgHeading);
}
}class TwoWheelOdometry(
private val leftMotor: DcMotor,
private val rightMotor: DcMotor
) {
var x = 0.0
private set
var y = 0.0
private set
var heading = 0.0
private set
private var lastLeftPos = 0
private var lastRightPos = 0
companion object {
const val COUNTS_PER_INCH = 50.0
const val TRACK_WIDTH = 14.0 // inches between wheels
}
fun update() {
// Read current encoder positions
val leftPos = leftMotor.currentPosition
val rightPos = rightMotor.currentPosition
// Calculate change since last update
val leftDelta = (leftPos - lastLeftPos) / COUNTS_PER_INCH
val rightDelta = (rightPos - lastRightPos) / COUNTS_PER_INCH
// Update last positions
lastLeftPos = leftPos
lastRightPos = rightPos
// Calculate forward movement and heading change
val centerDelta = (leftDelta + rightDelta) / 2.0
val headingDelta = (rightDelta - leftDelta) / TRACK_WIDTH
// Update heading
heading += headingDelta
// Update position (using average heading)
val avgHeading = heading - (headingDelta / 2.0)
x += centerDelta * cos(avgHeading)
y += centerDelta * sin(avgHeading)
}
}Pros:
- No extra hardware needed
- Simple to implement
- Good for basic autonomous
Cons:
- Wheel slip causes major errors
- Strafe movement not tracked (mecanum/X-drive)
- Accuracy degrades over time
2. Three-Wheel Odometry (Dead Wheels)
Uses three dedicated tracking wheels (also called "dead wheels" or "odometry pods") that spin freely independent of drivetrain motors.
Setup:
- Two parallel wheels (left and right tracking)
- One perpendicular wheel (strafe tracking)
- All connected to encoder ports
public class ThreeWheelOdometry {
private DcMotor leftEncoder, rightEncoder, strafeEncoder;
private double x = 0, y = 0, heading = 0;
private int lastLeft = 0, lastRight = 0, lastStrafe = 0;
private static final double COUNTS_PER_INCH = 8192.0 / (35.0 * Math.PI);
private static final double TRACK_WIDTH = 12.5; // Distance between parallel wheels
private static final double CENTER_OFFSET = 6.0; // Strafe wheel offset from center
public void update() {
// Read encoder positions
int left = leftEncoder.getCurrentPosition();
int right = rightEncoder.getCurrentPosition();
int strafe = strafeEncoder.getCurrentPosition();
// Calculate deltas
double leftDelta = (left - lastLeft) / COUNTS_PER_INCH;
double rightDelta = (right - lastRight) / COUNTS_PER_INCH;
double strafeDelta = (strafe - lastStrafe) / COUNTS_PER_INCH;
// Update last positions
lastLeft = left;
lastRight = right;
lastStrafe = strafe;
// Calculate heading change
double headingDelta = (leftDelta - rightDelta) / TRACK_WIDTH;
heading += headingDelta;
// Calculate local movement (robot-centric)
double forwardDelta = (leftDelta + rightDelta) / 2.0;
double strafeDeltaAdjusted = strafeDelta - (CENTER_OFFSET * headingDelta);
// Convert to global coordinates (field-centric)
double avgHeading = heading - (headingDelta / 2.0);
x += forwardDelta * Math.cos(avgHeading) - strafeDeltaAdjusted * Math.sin(avgHeading);
y += forwardDelta * Math.sin(avgHeading) + strafeDeltaAdjusted * Math.cos(avgHeading);
}
public double getX() { return x; }
public double getY() { return y; }
public double getHeading() { return Math.toDegrees(heading); }
}class ThreeWheelOdometry(
private val leftEncoder: DcMotor,
private val rightEncoder: DcMotor,
private val strafeEncoder: DcMotor
) {
var x = 0.0
private set
var y = 0.0
private set
var heading = 0.0
private set
private var lastLeft = 0
private var lastRight = 0
private var lastStrafe = 0
companion object {
const val COUNTS_PER_INCH = 8192.0 / (35.0 * PI)
const val TRACK_WIDTH = 12.5 // Distance between parallel wheels
const val CENTER_OFFSET = 6.0 // Strafe wheel offset from center
}
fun update() {
// Read encoder positions
val left = leftEncoder.currentPosition
val right = rightEncoder.currentPosition
val strafe = strafeEncoder.currentPosition
// Calculate deltas
val leftDelta = (left - lastLeft) / COUNTS_PER_INCH
val rightDelta = (right - lastRight) / COUNTS_PER_INCH
val strafeDelta = (strafe - lastStrafe) / COUNTS_PER_INCH
// Update last positions
lastLeft = left
lastRight = right
lastStrafe = strafe
// Calculate heading change
val headingDelta = (leftDelta - rightDelta) / TRACK_WIDTH
heading += headingDelta
// Calculate local movement (robot-centric)
val forwardDelta = (leftDelta + rightDelta) / 2.0
val strafeDeltaAdjusted = strafeDelta - (CENTER_OFFSET * headingDelta)
// Convert to global coordinates (field-centric)
val avgHeading = heading - (headingDelta / 2.0)
x += forwardDelta * cos(avgHeading) - strafeDeltaAdjusted * sin(avgHeading)
y += forwardDelta * sin(avgHeading) + strafeDeltaAdjusted * cos(avgHeading)
}
fun getHeadingDegrees() = Math.toDegrees(heading)
}Pros:
- No wheel slip interference (free-spinning wheels)
- Tracks strafe movement (mecanum/X-drive)
- Much more accurate than drive encoders
- Industry-standard for competitive teams
Cons:
- Requires extra hardware (wheels, encoders, mounts)
- More complex to build and calibrate
- Takes up precious encoder ports
Recommended Setup: Use omniwheels (35mm or 48mm diameter) for dead wheels. They have low friction and won't interfere with robot movement!
3. IMU-Assisted Odometry
Combines wheel encoders with an IMU (Inertial Measurement Unit) for better heading accuracy.
Why Use IMU?
- Wheel-based heading drifts over time
- IMU provides absolute heading reading
- Combining both gives best results
public class IMUOdometry {
private DcMotor leftEncoder, rightEncoder, strafeEncoder;
private IMU imu;
private double x = 0, y = 0;
private int lastLeft = 0, lastRight = 0, lastStrafe = 0;
private static final double COUNTS_PER_INCH = 8192.0 / (35.0 * Math.PI);
public void update() {
// Get heading from IMU (more accurate than wheel-based)
double heading = imu.getRobotYawPitchRollAngles().getYaw(AngleUnit.RADIANS);
// Read encoder positions
int left = leftEncoder.getCurrentPosition();
int right = rightEncoder.getCurrentPosition();
int strafe = strafeEncoder.getCurrentPosition();
// Calculate deltas
double leftDelta = (left - lastLeft) / COUNTS_PER_INCH;
double rightDelta = (right - lastRight) / COUNTS_PER_INCH;
double strafeDelta = (strafe - lastStrafe) / COUNTS_PER_INCH;
// Update last positions
lastLeft = left;
lastRight = right;
lastStrafe = strafe;
// Calculate local movement
double forwardDelta = (leftDelta + rightDelta) / 2.0;
// Convert to global coordinates using IMU heading
x += forwardDelta * Math.cos(heading) - strafeDelta * Math.sin(heading);
y += forwardDelta * Math.sin(heading) + strafeDelta * Math.cos(heading);
}
}class IMUOdometry(
private val leftEncoder: DcMotor,
private val rightEncoder: DcMotor,
private val strafeEncoder: DcMotor,
private val imu: IMU
) {
var x = 0.0
private set
var y = 0.0
private set
private var lastLeft = 0
private var lastRight = 0
private var lastStrafe = 0
companion object {
const val COUNTS_PER_INCH = 8192.0 / (35.0 * PI)
}
fun update() {
// Get heading from IMU (more accurate than wheel-based)
val heading = imu.robotYawPitchRollAngles.getYaw(AngleUnit.RADIANS)
// Read encoder positions
val left = leftEncoder.currentPosition
val right = rightEncoder.currentPosition
val strafe = strafeEncoder.currentPosition
// Calculate deltas
val leftDelta = (left - lastLeft) / COUNTS_PER_INCH
val rightDelta = (right - lastRight) / COUNTS_PER_INCH
val strafeDelta = (strafe - lastStrafe) / COUNTS_PER_INCH
// Update last positions
lastLeft = left
lastRight = right
lastStrafe = strafe
// Calculate local movement
val forwardDelta = (leftDelta + rightDelta) / 2.0
// Convert to global coordinates using IMU heading
x += forwardDelta * cos(heading) - strafeDelta * sin(heading)
y += forwardDelta * sin(heading) + strafeDelta * cos(heading)
}
}Pros:
- Accurate heading even with wheel slip
- No heading drift accumulation
- Great for long autonomous routines
Cons:
- IMU drift can still occur (slowly)
- Magnetic interference affects IMU readings
- Requires IMU calibration
Tuning Odometry
To get accurate odometry, you must calibrate these values:
1. Wheel Diameter
Measure the actual diameter of your tracking wheels. Manufacturing tolerances mean printed values aren't always exact.
2. Counts Per Inch
Use the formula:
COUNTS_PER_INCH = ENCODER_TICKS_PER_REV / (WHEEL_DIAMETER * π)For REV Through Bore Encoder (8192 ticks/rev) with 35mm omniwheel:
COUNTS_PER_INCH = 8192 / (35mm * π) ≈ 74.6 ticks/mm ≈ 1894 ticks/inch3. Track Width
Track width is the distance between the parallel odometry wheels.
To calibrate:
- Turn robot in place exactly 10 full rotations
- Note encoder readings
- Calculate:
TRACK_WIDTH = (encoder_diff / 10) / (2 * π)
4. Strafe Coefficient
Strafe wheels sometimes have different effective diameters due to scrubbing. Test strafing left/right and adjust accordingly.
Using Odometry in Autonomous
Once odometry is running, you can navigate to specific coordinates:
public void goToPoint(double targetX, double targetY) {
while (opModeIsActive()) {
odometry.update(); // Update position
// Calculate error
double errorX = targetX - odometry.getX();
double errorY = targetY - odometry.getY();
double distance = Math.hypot(errorX, errorY);
if (distance < 2.0) break; // Within 2 inches
// Calculate angle to target
double angleToTarget = Math.atan2(errorY, errorX);
double headingError = angleToTarget - odometry.getHeading();
// Simple proportional control
double forward = Math.cos(headingError) * distance * 0.05;
double strafe = Math.sin(headingError) * distance * 0.05;
double turn = headingError * 0.3;
// Apply to drivetrain (mecanum example)
drivetrain.drive(forward, strafe, turn);
}
}fun goToPoint(targetX: Double, targetY: Double) {
while (opModeIsActive()) {
odometry.update() // Update position
// Calculate error
val errorX = targetX - odometry.x
val errorY = targetY - odometry.y
val distance = hypot(errorX, errorY)
if (distance < 2.0) return // Within 2 inches
// Calculate angle to target
val angleToTarget = atan2(errorY, errorX)
val headingError = angleToTarget - odometry.heading
// Simple proportional control
val forward = cos(headingError) * distance * 0.05
val strafe = sin(headingError) * distance * 0.05
val turn = headingError * 0.3
// Apply to drivetrain (mecanum example)
drivetrain.drive(forward, strafe, turn)
}
}Common Mistakes
Not calling update() every loop — Position won't track properly
Using drive motors on mecanum without strafe tracking — X/Y position will be wrong
Forgetting to calibrate constants — Odometry will drift massively
Not resetting encoders at start — Initial position will be wrong
Mounting wheels incorrectly — Wheels must spin freely and touch ground consistently
Comparison Table
| Type | Accuracy | Setup Difficulty | Hardware Cost | Best For |
|---|---|---|---|---|
| Drive Encoders (2-Wheel) | ⭐⭐ | Easy | Free | Tank drive, beginners |
| Three Dead Wheels | ⭐⭐⭐⭐⭐ | Hard | $50-280 | Competitive teams, mecanum |
| IMU-Assisted | ⭐⭐⭐⭐ | Moderate | Included (Control Hub) | Long autonomous, precision |
Next Steps
Now that you understand odometry, learn how to use it for advanced navigation:
- Motion Planning — Choose the best path to your target
- Pure Pursuit — Follow smooth curved paths with odometry
- Sensor Fusion — Combine odometry with vision for even better accuracy